
Digged out some photos of an unfinished project Lego+Arduino camera shutter controller from my old hard drive. Started about 4 years ago, aiming to improve the precision of the old lego highspeed photography project. Unfortunately, the parts are now disassembled and stored at different places in AU or CN. No idea how long to complete. Keep a reminder here and will update the future progress once settled.
Structure …DONE






Interface …DONE
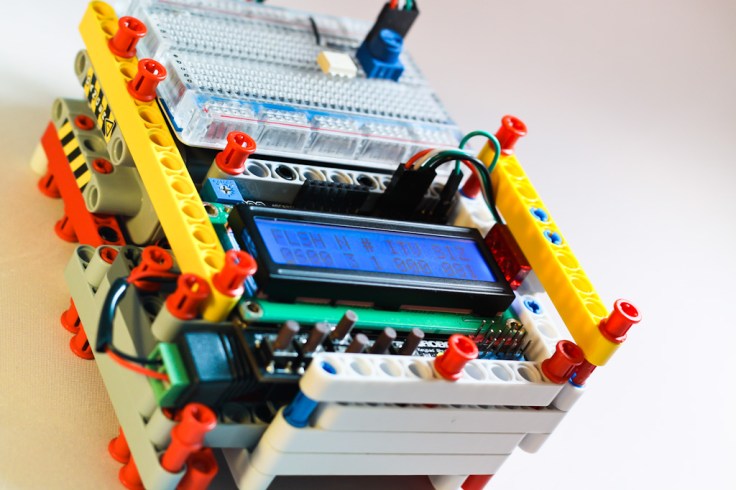
How it looks when powered on.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| /* Arduino highspeed photo controller (beta) 0.1a | |
| * | |
| * ##### trigger by phooto sensor ##### | |
| * | |
| * Benjaminxuu 2012 | |
| * | |
| * | |
| * 1. Program itself | |
| * This program is used for the photos of water droplets relased from a solenoid valve. It has three basic functions: | |
| * | |
| * Camera trigger with a delay timer | |
| * power out to laser pointer with the combination of input photocell signal | |
| * signal output to relay to control solenoid valve | |
| * | |
| * 2. Pin in use: | |
| * | |
| * | |
| * | |
| * 3. Interface design: | |
| * | |
| * a. Setting the first droplet, interval is not displayed for the first droplet | |
| * | |
| * FLSH_N_#_ITV_SIZ | |
| * 0600_3_1_____060 | |
| * | |
| * b. Setting the second droplet, default interval is 90ms | |
| * | |
| * FLSH_N_#_ITV_SIZ | |
| * 0600_3_2_090_060 | |
| * | |
| * c. (trigger delay)_(total number droplet)_(number of edit)_(droplet interval)_(droplet size) | |
| * | |
| * * tigger delay is the daley time (in ms) after when the first droplet block the laser tripping trap. | |
| * * total number of droplet defines how many droplets of water will be released from the solenoid valve. | |
| * * changing the number of edit will switch the last 7 digits to display the droplet interval and droplet size for editting. | |
| * * droplet interval defines the time between two water droplets, this value will be 0 and not editable for droplet #1. | |
| * * droplet size is controlled by the solenoid valve opening time. (longer the larger, but need to find an optimum valve for a clean image) | |
| * | |
| * | |
| * 4. Instruction: | |
| * | |
| * | |
| * 5. Notes: | |
| * | |
| * | |
| * | |
| * | |
| * | |
| */ | |
| #include <LiquidCrystal.h> | |
| LiquidCrystal lcd(8, 9, 4, 5, 6, 7); | |
| int backLightSwitch = 10; // Pin 10 control back light on LCD | |
| int Valve = 13; // Pin 13 control solenoid valve open/close | |
| int Laser = 12; // pin 12 output power laser pointer | |
| int Trigger = 11; // pin 11 output to trigger camera | |
| int photoSensor = 1; // Analog pin 1 read photocell input | |
| int soundSensor = 3; // Analog pin 1 read microphone input | |
| int soundVal = analogRead(soundSensor); | |
| /* | |
| * Right Value = 0 | |
| * Up Value = 1 | |
| * Down Value = 2 | |
| * Left Value = 3 | |
| * Select Value = 4 | |
| */ | |
| int adc_key_val[] ={ 30, 150, 360, 535, 760 }; | |
| int adc_key_in; | |
| int key=-1; | |
| int oldkey=-1; | |
| int RowTop = 0; | |
| int RowBottom = 1; | |
| int cursorValue = 0; | |
| //initial for ON/OFF | |
| int backLightON = HIGH; | |
| int backLightOFF = LOW; | |
| int valueBottom[] = {0, 6, 0, 0, -1 , 3, -1, 1, -1, 0, 0, 0, -1 , 0, 8, 1}; | |
| long Interval[] = {0, 91, 92, 93, 94, 95, 96, 97, 98}; // pause between two droplets in (ms) | |
| long dropletSize[] = {81, 82, 83, 84, 85, 86, 87, 88, 89}; // open time (ms) of solenoid valve control size | |
| long triggerDelay; | |
| long totalNm = valueBottom[5]; // total number of droplets in one run | |
| long numberofDrop; // value of # | |
| unsigned long timer; | |
| void update() | |
| { | |
| numberofDrop = valueBottom[7]; | |
| totalNm = valueBottom[5]; | |
| valueBottom[9] = (Interval[numberofDrop-1]/100) % 10; | |
| valueBottom[10] = (Interval[numberofDrop-1]/10) % 10; | |
| valueBottom[11] = (Interval[numberofDrop-1]) % 10; | |
| valueBottom[13] = (dropletSize[numberofDrop-1]/100) % 10; | |
| valueBottom[14] = (dropletSize[numberofDrop-1]/10) % 10; | |
| valueBottom[15] = (dropletSize[numberofDrop-1]) % 10; | |
| triggerDelay = valueBottom[0] * 1000 + valueBottom[1] * 100 + valueBottom[2] * 10 + valueBottom[3]; | |
| lcd.setCursor(0, RowBottom); | |
| int t = 0 ; | |
| for (t = 0; t < 16; t++) | |
| { | |
| if (valueBottom[t] <= -1) | |
| { | |
| lcd.print(" "); | |
| } | |
| else | |
| { | |
| lcd.print(valueBottom[t]); | |
| } | |
| } | |
| } | |
| void save() | |
| { | |
| Interval[numberofDrop-1] = valueBottom[9] * 100 + valueBottom[10] * 10 + valueBottom[11]; | |
| dropletSize[numberofDrop-1] = valueBottom[13] * 100 + valueBottom[14] * 10 + valueBottom[15]; | |
| triggerDelay = valueBottom[0] * 1000 + valueBottom[1] * 100 + valueBottom[2] * 10 + valueBottom[3]; | |
| } | |
| void setup() | |
| { | |
| pinMode(backLightSwitch, OUTPUT); | |
| pinMode(Valve, OUTPUT); | |
| pinMode(Laser, OUTPUT); | |
| pinMode(Trigger, OUTPUT); | |
| pinMode(photoSensor, INPUT); | |
| //pinMode(soundSensor, INPUT); | |
| lcd.begin(16, 2); | |
| //Serial.begin(9600); | |
| digitalWrite(backLightSwitch, backLightON); | |
| lcd.clear(); | |
| lcd.setCursor(0, RowTop); | |
| lcd.print("FLSH N # ITV SIZ"); | |
| lcd.setCursor(0, RowBottom); | |
| int i = 0 ; | |
| for (i = 0; i < 16; i++) | |
| { | |
| if (valueBottom[i] <= -1) | |
| { | |
| lcd.print(" "); | |
| } | |
| else | |
| { | |
| lcd.print(valueBottom[i]); | |
| } | |
| } | |
| //lcd.print("0600 3 1 000 050"); | |
| triggerDelay = valueBottom[0] * 1000 + valueBottom[1] * 100 + valueBottom[2] * 10 + valueBottom[3]; | |
| lcd.setCursor(cursorValue, RowBottom); | |
| lcd.cursor(); | |
| } | |
| void loop() | |
| { | |
| adc_key_in = analogRead(0); // read the value from the sensor | |
| key = get_key(adc_key_in); // convert into key press | |
| if (key != oldkey) // if keypress is detected | |
| { | |
| delay(50); // wait for debounce time | |
| adc_key_in = analogRead(0); // read the value from the sensor | |
| key = get_key(adc_key_in); // convert into key press | |
| if (key != oldkey) | |
| { | |
| oldkey = key; | |
| if (key >=0) | |
| { | |
| rightkey(); //right key | |
| } | |
| if (key == 1) //up key | |
| { | |
| upkey(); | |
| } | |
| else if (key == 2) //down key | |
| { | |
| downkey(); | |
| } | |
| else if (key == 3) //left key | |
| { | |
| leftkey(); | |
| } | |
| else if (key == 4) //select key | |
| { | |
| selectkey(); | |
| delay(500); | |
| } | |
| } | |
| } | |
| } | |
| // Convert ADC value to key number | |
| int get_key(unsigned int input) | |
| { | |
| int k; | |
| for (k = 0; k < 5; k++) | |
| { | |
| if (input < adc_key_val[k]) | |
| { | |
| return k; | |
| } | |
| } | |
| if (k >= 5) | |
| k = -1; // No valid key pressed | |
| return k; | |
| } | |
| /* | |
| */ | |
| void rightkey() | |
| { | |
| if (key == 0) //right key | |
| { | |
| cursorValue++ ; | |
| if (cursorValue >= 16) cursorValue = 0; | |
| lcd.setCursor (cursorValue, RowBottom); | |
| } | |
| } | |
| /* | |
| */ | |
| void leftkey() | |
| { | |
| cursorValue– ; | |
| if (cursorValue <= -1) cursorValue = 15; | |
| lcd.setCursor (cursorValue, RowBottom); | |
| } | |
| /* | |
| */ | |
| void upkey() | |
| { | |
| int i; | |
| for (i = 0; i < 16; i++) | |
| { | |
| if (i == cursorValue) | |
| { | |
| if (i == 4 || i == 6 || i == 8 || i == 12) | |
| { | |
| lcd.print(" "); | |
| } | |
| else if (i >= 0 && i <= 3) | |
| { | |
| valueBottom[i]++; | |
| if (valueBottom[i] >=10) valueBottom[i] = 0; | |
| lcd.print(valueBottom[i]); | |
| update(); | |
| } | |
| else if (i == 5) | |
| { | |
| valueBottom[i]++; | |
| if (valueBottom[i] >=10) valueBottom[i] = 9; | |
| valueBottom[7] = 1; | |
| update(); | |
| } | |
| else if (i == 7) | |
| { | |
| valueBottom[i]++; | |
| if (valueBottom[i] >= valueBottom[5]) valueBottom[i] = valueBottom[5]; | |
| update(); | |
| } | |
| else if (i >= 9 && i <= 11 && valueBottom[7] != 1 ) | |
| { | |
| valueBottom[i]++; | |
| if (valueBottom[i] >=10) valueBottom[i] = 0; | |
| save(); | |
| update(); | |
| } | |
| else if (i >=13 && i <= 15) | |
| { | |
| valueBottom[i]++; | |
| if (valueBottom[i] >= 10) valueBottom[i] = 0; | |
| save(); | |
| update(); | |
| } | |
| } | |
| } | |
| lcd.setCursor (cursorValue, RowBottom); | |
| } | |
| /* | |
| */ | |
| void downkey() | |
| { | |
| int i; | |
| for (i = 0; i < 16; i++) | |
| { | |
| if (i == cursorValue) | |
| { | |
| if (i == 4 || i == 6 || i == 8 || i == 12) | |
| { | |
| lcd.print(" "); | |
| } | |
| else if (i >= 0 && i <= 3) | |
| { | |
| valueBottom[i]–; | |
| if (valueBottom[i] <= -1) valueBottom[i] = 9; | |
| lcd.print(valueBottom[i]); | |
| update(); | |
| } | |
| else if (i == 5) | |
| { | |
| valueBottom[i]–; | |
| if (valueBottom[i] <= 1) valueBottom[i] = 1; | |
| valueBottom[7] = 1; | |
| update(); | |
| } | |
| else if (i == 7) | |
| { | |
| valueBottom[i]–; | |
| if (valueBottom[i] <= 1) valueBottom[i] = 1; | |
| update(); | |
| } | |
| else if (i >=9 && i <= 11 && valueBottom[7] != 1) | |
| { | |
| valueBottom[i]–; | |
| if (valueBottom[i] <= -1) valueBottom[i] = 9; | |
| save(); | |
| update(); | |
| } | |
| else if (i >=13 && i <= 15) | |
| { | |
| valueBottom[i]–; | |
| if (valueBottom[i] <= -1) valueBottom[i] = 9; | |
| save(); | |
| update(); | |
| } | |
| } | |
| } | |
| lcd.setCursor (cursorValue, RowBottom); | |
| } | |
| /* | |
| */ | |
| void selectkey() | |
| { | |
| update(); | |
| save(); | |
| delay(500); | |
| digitalWrite(Laser, HIGH); | |
| digitalWrite(backLightSwitch, LOW); | |
| int i = 0; | |
| long k = 0; | |
| long runTimer[totalNm]; | |
| long totalTime = 0; | |
| for (i = 0; i < totalNm; i++) | |
| { | |
| totalTime = totalTime + Interval[i] + dropletSize[i]; | |
| } | |
| lcd.setCursor(0, RowTop); | |
| long timerA; | |
| long timerB; | |
| for (i = 0; i < totalNm ; i++) | |
| { | |
| runTimer[i] = Interval[i] + dropletSize[i]; | |
| timerA = millis(); | |
| while ((millis() – timerA) <= runTimer[i]) | |
| { | |
| if (millis() – timerA >= Interval[i]) digitalWrite(Valve, HIGH); | |
| if (soundVal >= 100) | |
| { | |
| timerB = millis(); | |
| if (millis() – timerB >= triggerDelay) digitalWrite(Trigger, HIGH); | |
| } | |
| } | |
| digitalWrite(Valve, LOW); | |
| } | |
| if (totalTime <= triggerDelay) | |
| { | |
| delay(triggerDelay – totalTime); | |
| digitalWrite(Trigger, HIGH); | |
| delay(200); | |
| } | |
| // lcd.print(timerA); | |
| // lcd.print(" "); | |
| // lcd.print(timerB); | |
| digitalWrite(backLightSwitch, HIGH); | |
| digitalWrite(Trigger, LOW); | |
| digitalWrite(Laser, LOW); | |
| lcd.setCursor(cursorValue, RowBottom); | |
| } | |
Remote shutter connection … DONE
Photo-interrupter …Pending
Solenoid …Pending
Test …Pending

Leave a comment